Image extraction from: Adaptive hierarchical origami-based metastructures, DOI: 10.1038/s41467-024-50497-5
NC주립대학교, 종이접기에서 영감을 얻은 변신 로봇 개발
읽는 시간: 2 분
업데이트 날짜 4월 7, 2025
-
![Kiara Fabbri]()
-
![현지화 및 번역 팀]()
번역가 현지화 및 번역 팀 현지화 및 번역 서비스

노스캐롤라이나 주립대학의 연구팀이 세 개의 모터만을 이용해 1,000개 이상의 구성으로 변형 가능한 플라스틱 큐브 구조물을 만들었습니다. 이런 혁신적인 발전은 다양한 용도로 사용될 수 있는 유연한 로봇의 개발을 이끌어낼 수 있을 것이며, 특히 건축과 우주 탐사 분야에서 큰 활약을 할 것으로 보입니다.
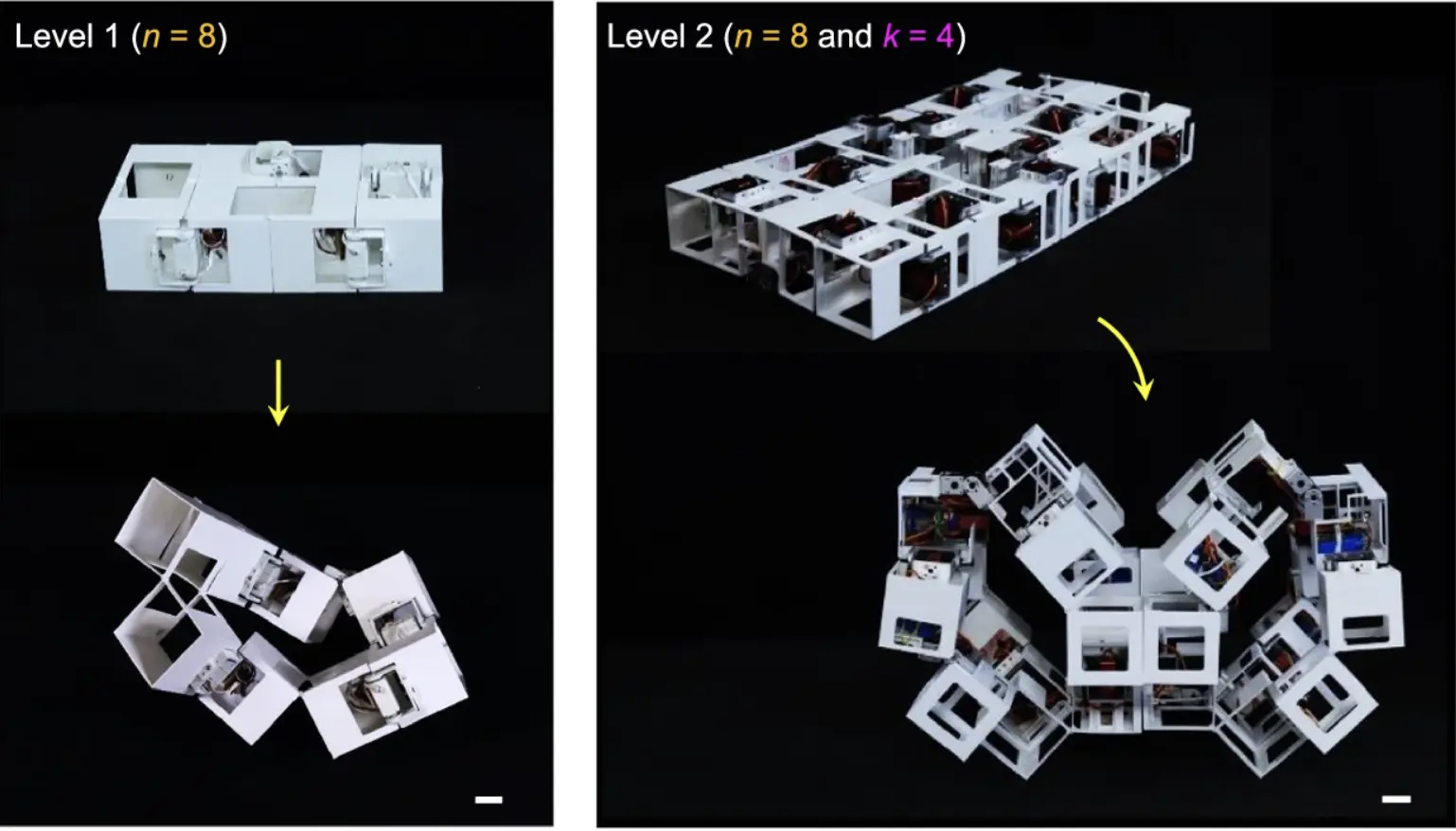
연구 논문에서, 연구팀은 3D 프린터를 이용해 회전하는 힌지로 연결된 36개의 빈 플라스틱 큐브를 조립하는 방법을 설명합니다. 일부 힌지는 금속 핀으로 고정되었고, 일부는 모터화되었습니다. 이런 구성은 구조물이 다양한 형태로 변형되는 것을 가능하게 했으며, 이에는 터널, 다리, 그리고 다층 구조물 등이 포함되어 있습니다.
변형을 통해, 변신 로봇들은 발이 필요 없이 모든 방향으로 움직일 수 있으며, 자신의 무게의 세 배까지의 짐을 옮길 수 있습니다.
이런 변형 가능한 로봇들은 다양한 작업과 환경에 적응할 수 있어, 우주 탐사와 같은 분야에서 다기능적으로 활용될 가능성이 있습니다. 로봇들이 짐을 옮기고 필요에 따라 형태를 바꿀 수 있는 이런 능력은 인공 시스템의 디자인을 혁신적으로 변화시킬 수 있을 것입니다.
“이것들은 배포 가능하고, 구성 가능한 우주 로봇과 보금자리로 사용될 수 있다고 생각합니다,” 라며 이 논문의 공동 1저자인 Antonio Di Lallo가 주장했습니다. “모듈식이기 때문에 평평하게 우주로 보낸 뒤, 피난처나 보금자리로 조립하고, 그 후에 분해할 수 있습니다.”
이 기술은 큰 잠재력을 지니고 있지만, 일부 제한 사항이 있습니다. 특히 큰 규모에서의 구조물의 하중 용량이 개선이 필요합니다. 현재의 프로토타입은 힌지에 사용된 재료 때문에, 유연성을 위해 강도를 희생한 것이 중량을 많이 견디는 능력에 제한을 받습니다. 또한, 연구자들은 구조변환 능력을 다양한 로봇 이동에 완전히 활용하는 것에 대한 도전이 있다고 지적했습니다. 이는 구조화되지 않은 환경에서 특히 그렇습니다.
이 연구는 미래 탐험을 위한 새로운 방향을 제시한다. “우리는 더 큰 부하를 견딜 수 있는 더욱 견고한 구조를 만들고 싶습니다.”라고 논문의 공동 통신 저자인 Yanbin Li가 NC State University News에서 발표했다. “예를 들어 자동차 형태를 원한다면, 어떻게 하면 자동차 형태로 변형할 수 있는 첫 번째 구조를 설계할 수 있을까요? 우리는 또한 우주 로봇과 같은 실제 세계의 응용 분야에서 우리의 구조를 테스트하고 싶습니다.”
Nature Communications에 게재된 이 연구는 국립 과학 재단의 지원을 받았다. 이런 혁신적인 로봇 디자인 접근법은 인공 시스템의 새로운 발전을 위한 길을 열 수 있으며, 이를 통해 더 다양한 응용 분야에서 더 적응력 있고 기능적일 수 있게 만들 수 있다.

 최신 기사
최신 기사 


댓글 달기
취소